
Урок 22
Сегодня мы начнем изучать очень интересную технологию, а для микроконтроллера — периферию — это аналго-цифровой преобразователь или как его называют АЦП. В английской аббревиатуре, гораздо чаще встречающейся в технической документации — ADC (Analog-to-Digital Converter). Это такая штука, которая преобразует величину электрического сигнала в цифровой код. Затем данный код мы уже используем для обработки или для отображения тем или иным образом данной электрической величины. Это очень распространённая периферия или технология. АЦП активно используется в звукозаписи, измерительной технике, видеозаписи и во многих других случаях. Поэтому нас обойти данную вещь стороной никак не получится, тем более АЦП поддерживается аппаратно в контроллерах AVR.
В контроллере Atmega8 АЦП имеет следующие характеристики
- Разрешение 10 бит,
- Время преобразования одного показания от 13 до 250 микросекунд в зависимости от битности измерения, а также от тактовой частоты генератора, тактирующего контроллер,
- Поддержка запуска по прерываниям,
Есть ещё масса различных характеристик, с которыми мы, возможно, познакомимся в дальнейшем.
Как вообще работает цифровое преобразование?
Берётся опорное напряжение и сравнивается с измеряемым. Соответственно, опорное напряжение всегда должно быть больше измеряемого. Если это не так, то нужно будет применять делители напряжения.
Изобразим схематично процесс измерения

Отрезок — это диапазон измерений. Он находится между нулём и опорным напряжением. А стрелка — это измеряемое напряжение.
Данный отрезок делится пополам, и АЦП оценивает, в какой половине находится приложенное напряжение

Если оно находится в стороне нуля, то в самый старший бит результата записывается 0, а если в стороне максимального напряжения, то единица. У нас будет единица. Затем та половина отрезка, на которой находится измеряемое напряжение делится ещё пополам, и АЦП опять измеряет, в какой половинке уже данного отрезка у нас находится измеряемое напряжение

Оценка идёт по тому же принципу — в какой стороне отрезок. В нашем случае будет 0. И этот ноль записывается в следующий более младший бит
Затем та четвертинка опять делится пополам и АЦП опять оценивает,где находится отрезок

И АЦП так и продолжает такой процесс до тех пор, пока не кончатся ячейки для битов. То есть если мы используем 10-битный режим, то. соответственно, и будет 10 подобных измерений и заполнятся 10 бит величины. Чем больше бит, тем точнее результат, но уже потребуется на это больше времени и более серьёзный и точный АЦП. Имея данный результат, нам несложно будет посчитать величину измеренного напряжения. Мы знаем. что если у нас АЦП 10-битный, то данный результат у нас лежит в промежутке от 0 до 1024, получаемтся всего у нас 1023 отрезка. И мы затем наш результат делим на 1023 и умножаем на величину опорного напряжения.
Посмотрим блок-схему АЦП в контроллере Atmega8
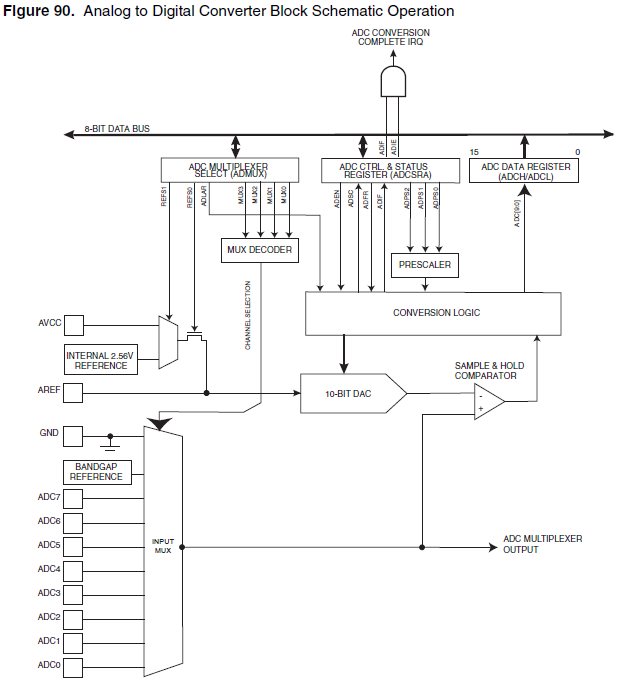
Мы видим, что у нас есть мультиплексор, имеющий 8 каналов, вход для опрного напряжения AREF. Также существует 8-разрядная шина данных, значения с которых записываются в определённый регистр. Есть регистр данных, регистр управления и состояния, а также регистр управления мультиплексором.
Мы будем использовать самый первый вход ADC0 и в качестве источника измеряемого напряжения будем использовать центральную ножку переменного резистора, подлключенного к контактам питания

Работать будем сначала в протеусе. Также мы видим, что у нас подключен дисплей самым обычным образом.
Также мы всё подключим и на живом контроллере

Существует несколько вариантов опорных напряжений, которые мы можем использовать.в нашем АЦП. Мы будем использовать внутреннее опорное напряжение на 2,56 вольт, оно проще, не нужно ничего подключать. Возможно, при таком варианте не очень сильная точность, но перед нами не стоит задача создать точный измерительный прибор. У нас есть задача — изучить возможность использования АЦП в контроллере AVR.
А вот и таблица вариантов опроных напряжений для АЦП

Перечислим данные варианты сверху вних по таблице. 1 вариант — это внутреннее опорное напряжение, равное напряжению питания, 2 вариант — опорное напряжение подаётся на вход AREF извне, 3 вариант — внутреннее 2,56 вольт с использованием внешнего конденсатора, которы у нас уже припаян к отладочной плате к определённым ножкам контроллера.
Также в АЦП есть делитель частоты на величину от 2 до 128. Делитель этот для того, чтобы мы добивались частоты работы АЦП не больше 200 кГц, иначе точность измерений будет очень малой и мы просто растеряем самые младшие биты. Если у нас возникнет требование имено к скорости измерений и нам уже точность будет на так важна, то мы сможем использовать и более высокие частоты измерений.
Теперь немного поближе познакомимся с регистрами АЦП.
Регистр ADCSRA — управляющий и статусный регистр

ADEN — данный бит включает АЦП.
ADSC — при установке в 1 заставляет АЦП начинать преобразование.
ADFR — используется в режиме с использованием прерываний. При установке в 1 включает круговой режим, при котором измерения автоматически следуют одно за другим.
ADIF — бит, также используемый только в режиме прерываний. Это флаг прерываний, который устанавливается в определённых условиях.
ADIE — бит, включающий режим прерываний.
ADPS2-ADPS0 — биты, от комбинации которых зависит величина делителя

Регистр ADMUX — это регистр для управления каналами мультиплексора АЦП

Но, помимо непосредственно битов управления каналами у данного регистра есть ещё некоторые управляющие биты
REFS1-REFS0 — биты, включающие определённый режим использования опорного напряжения. Таблица была размещена на данной странице выше.
ADLAR — это бит организации расположения измеренных 10 битов в двух байтах регистровой пары данных. Поближе мы с этим расположением познакомимся чуть позже.
MUX3-MUX0 — биты, включающие определённый канал мультиплексора

Отсюда видно, что мы можем пользоваться несколькими каналами сразу только по очереди, попеременно включая различные комбинации данных битов. Также внизу есть две комбинации для калибровки нашего АЦП.
Ну и, наконец, регистровая пара ADCH и ADCL, состоящая из старшего и младшего байта в которую и заносится измеряемый результат. А как именно он туда укладывается, этот результат, зависит от состояния бита ADLAR, рассмотренного выше в регистре ADMUX

То есть, если бит ADLAR не выставлен, то младшие 8 бит результата находятся в младшем байте регистровой пары, а 2 старших бита — в младших битах старшего байта. Если же бит ADLAR у нас выставлен, то 8 самых старших бит результата находятся в сатршем байте, а 2 младших в 2 старших битах младшего байта регистровой пары. Второй вариант нам интересен при исользовании 8-битного режима. В данном случае мы читаем только старший байт.
Проект был создан полностью из проекта урока по изучению 4-битного режима подключения LCD Test09 и был назван MyADCLCD.
Также для выноса кода для реализации периферии АЦП были созданы стандартным образом два файла adc.h и adc.c. Соответственно файл adc.h был подключен и в файле main.h и в adc.c.
В файл MyADCLCD.c код был также полностью скопирован из главного файла проекта Test09, всё лишнее было удалено. Код в данном файле после данной операции принял следующий вид
Урок 8.

Аналого-Цифровой преобразователь — устройство, преобразующее входной аналоговый сигнал в цифровой код. Под аналоговой величиной подразумевается ток, напряжение, сопротивление, емкость, частота, и так далее. На выходе АЦП мы получаем цифровое представление входной величины. Именно благодаря АЦП микроконтроллер может оперировать аналоговыми сигналами.
Однако АЦП микроконтроллера может измерять только напряжение. Поэтому любую другую величину, например ток, перед измерением необходимо преобразовать в напряжение.
Преобразование входного сигнала в численное представление происходит относительно опорного напряжения. Опорное напряжение( Vref ) — эталонное напряжение, относительно которого происходит преобразование входной величины. При использовании АЦП микроконтроллера AtMega 8, опорное напряжение необходимо подавать на соответствующую ножку контроллера.
Измерение напряжения производится в диапазоне от 0 до Vref .Весь этот диапазон делится в соответствии с разрядностью. То есть если разрядность АЦП — 10 Бит, то диапазон делится на 1023, если 8 бит, то на 255 и так далее. Предполагая, что Vref = 5 Вольтам, при разрядности 10 Бит мы получим шаг измерения 5/1023 = 0.0049 Вольт, а при разрядности 8 бит, шаг измерения станет 5/255 = 0.02 Вольт. То есть, чем меньше разрядность — тем ниже точность преобразования.
Предположим, что мы подаем на вход 10 битного АЦП, c Vref =5 Вольтам, напряжение 3 вольта. На выходе АЦП мы получим численное представление входного напряжения. Легко подсчитать, что шаг измерения равен 0.0049 Вольт, значит, на выходе АЦП мы получим . То есть, для получения значения входного напряжения, необходимо шаг измерения умножить на выходное значение АЦП.
Давайте рассмотрим регистры, отвечающие за конфигурацию АЦП микроконтроллера AtMega 8. АЦП в AtMega 8 всего один, однако, имеет 8 входных каналов. За выбор входного канала, а так же настройку опорного напряжения отвечает регистр ADMUX .

- Биты REFS 0- REFS 1 отвечают за выбор опорного напряжения.

- Биты MUX 0- MUX 3 отвечают за выбор входного канала.
- Бит ADLAR. Определяет порядок записи результатов преобразования в регистры ADCL и ADCH.



АЦП микроконтроллера AtMega 8, может работать как в режиме однократного преобразования, так и в режиме непрерывного преобразования (Следующее преобразование начинается сразу после предыдущего). За настройку режима преобразования, прерываний, а так же тактирования АЦП, отвечает регистр ADCSRA .

- Бит ADEN включает и выключает АЦП микроконтроллера.
ADEN = 1 — АЦП включен.
ADEN = 0 — АЦП выключен.
- При записи 1 в бит ADSC , в режиме однократного преобразования запускается преобразование.
- Бит ADFR , отвечает за выбор режима преобразования.
ADFR = 1 — Непрерывное преобразование.
ADFR = 0 — Однократное преобразование.
- Бит ADIF , флаг окончания преобразования, становится равен 1 при окончании преобразования
- Бит ADIE , разрешает прерывание АЦП.
ADIE = 1 — Прерывание разрешено.
ADIE = 0 — Прерывание запрещено.
- Биты ADPS 0- ADPS 2 отвечают за выбор предделителя между частотой тактирования микроконтроллера и АЦП.

Результат преобразования помещается в пару регистров ADCH и ADCL, в виде заданным значением бита ADLAR.
В качестве примера соберем простой вольтметр с применением LCD WH 1602, и встроенного АЦП микроконтроллера AtMega 8.
Содержание
Форум по AVR
АЦП – аналогово-цифровой преобразователь (ADC- Analog-to-Digital Converter). Преобразует некий аналоговый сигнал в цифровой. Битность АЦП определяет точность преобразования сигнала. Время преобразования – соответственно скорость работы АЦП. АЦП встроен во многих микроконтроллерах семейства AVR и упрощает использование микроконтроллера во всяких схемах регулирования, где требуется оцифровывать некий аналоговый сигнал.
Рассмотрим принцип работы АЦП. Для преобразования нужен источник опорного напряжения и собственно напряжение, которое мы хотим оцифровать (напряжение, которое преобразуется должно быть меньше опорного). Также нужен регистр, где будет храниться преобразованное значение, назовем его Z. Входное напряжение = Опорное напряжение*Z/2^N, где N – битность АЦП. Условимся, что этот регистр, как у ATmega8, 10-ти битный. Преобразование в нашем случае проходит в 10 стадий. Старший бит Z9 выставляется в единицу.
Далее генерируется напряжение (Опорное напряжение*Z/1024), это напряжение, с помощью аналогового компаратора сравнивается с входным, если оно больше входного, бит Z9 становиться равным нулю, а если меньше – остается единицей. Далее переходим к биту Z8 и вышеописанным способом получаем его значения. После того, как вычисление регистра Z окончено, выставляется некий флаг, который сигнализирует, что преобразование закончено и можно считывать полученное значение. На точность преобразования могут очень сильно влиять наводки и помехи, а также скорость преобразования. Чем медленнее происходит преобразования – тем оно точней. С наводками и помехами следует бороться с помощью индуктивности и емкости, как советует производитель в даташите: 
В микроконтроллерах AVR как источник опорного напряжения может использоваться вывод AREF, или внутренние источники 2,56В или 1,23В. Также источником опорного напряжения может быть напряжение питания. В некоторых корпусах и моделях микроконтроллеров есть отдельные выводы для питания АЦП: AVCC и AGND. Выводы ADCn – каналы АЦП.
С какого канала будет оцифровываться сигнал можно выбрать с помощью мультиплексора.
Теперь продемонстрируем примером сказанное выше. Соорудим макет, который будет работать как вольтметр с цифровой шкалой. Условимся, что максимальное измеряемое напряжение будет 10В. Также пусть наш макет выводит на ЖКИ содержимое регистра ADC.
Схема подключения:

Обвязка микроконтроллера и ЖКИ WH1602A стандартна. X1 – кварцевый резонатор на 4 Мгц, конденсаторы С1,С2 – 18-20 пФ. R1-C7 цепочка на выводе reset по 10 кОм и 0,1 мкФ соответственно. Сигнальный светодиод D1 и ограничивающий резистор R2 200 Ом и R3 – 20 Ом. Регулировка контраста ЖКИ – VR1 на 10 кОм. Источник опорного напряжения мы будем использовать встроенный на 2,56В. С помощью делителя R4-R5 мы добьемся максимального напряжения 2,5В на входе PC0, при напряжении на щупе 10В. R4 – 3 кОм, R5 – 1 кОм, в их номиналу нужно отнестись тщательно, но если не возможности подобрать точно такие, можно сделать любой резистивный делитель 1:4 и программно подкорректировать показания, если это потребуется. Дроссель на 10мкГн и конденсатор на 0,1 мкФ для устранения шумов и наводок на АЦП на схеме не показан. Их наличие подразумевается само собой, если используется АЦП. Теперь дело за программой:
Программа на языке Си:
Так-же есть хитрость, чтобы не работать с дробными числами. Когда производиться вычисления входного напряжения в вольтах. Мы просто будем хранить наше напряжения в милливольтах. Например, значение переменной voltage 4234 означает, что мы имеем 4,234 вольта. Вообще операции с дробными числами кушают очень много памяти микроконтроллера (наша прошивка вольтметра весит чуть больше 4 килобайт, это половина памяти программ ATmega8!), их рекомендуется использовать только при особой необходимости. Вычисления входного напряжения в милливольтах просто: voltage=R_division*2.56*u*1.024;
Здесь R_division – коэффициент резистивного делителя R4-R5. Так, как реальный коэффициент делителя может отличаться от расчетного, то наш вольтметр будет врать. Но подкорректировать это просто. С помощью тестера меряем некое напряжение, получаем X вольт, а наш вольтметр пускай показывает Y вольт. Тогда R_division = 4*X/Y, если Y больше X и 4*Y/X если X больше Y. На этом настройка вольтметра завершена, и им можно пользоваться.
Видео работы устройства:
Также можно доработать свой блок питания. Вставив в него цифровой вольтметр-амперметр на ЖКИ и защиту от перегрузки (для измерения тока нам понадобиться мощный шунт сопротивлением порядка 1 Ом). 
В свой блок питания я встроил еще защиту от перегрузки, когда ток превышает 2А, то пьезо пищалка начинает усердно пищать, сигнализируя о перегрузке:
Зачем в этом выражении
Зачем в этом выражении voltage=R_division*2.56*u*1.024;
1,024 ? Кто может объяснить?
Если в этой формуле совсем другие величины. Входное напряжение = Опорное напряжение*Z/2^N, где N – битность АЦП.





